

驱动器控制卡-更新
驱动器控制卡
特点
· 智能、紧凑且可自由编程的电机控制器
· 适用于无刷、直流有刷和步进电机
· 电机电源/逻辑电源/STO 电源:11 – 50 VDC / 9 – 36 VDC / 18-40VD
· 输出电流:10 A RMS 连续;28 A RMS 峰值电流
· 通过 RS232 或 EtherCAT
· STO 输入进行通信,安全完整性等级为 SIL3/Cat3/PLe
· 尺寸(长 x 宽 x 高):93 x 43.8 x 32 毫米
电气特性:
电机电源/逻辑电源/STO 电源:11–50 VDC/9-36VDC/18-40VDC
输出电流:10A RMS 连续,28A RMS 峰值电流
电机类型:
无刷直流电机(BLDC、PMSM 电机)
有刷直流电机(直流电机)
步进电机(2 或 3 相)
音圈执行器
线性电机
反馈选项:
第一反馈:
增量编码器
SinCos 1Vpp
数字霍尔传感器
模拟霍尔传感器
第二反馈:
增量编码器
SSI / BiSS-C
Panasonic
Tamagawa
EnDat 2.2
控制:
通过 EtherCAT 总线、脉冲和方向或模拟/数字输入
自动执行存储在驱动器存储器中的复杂运动。
通讯:
RS232 - 高达 115 Kbit/s
EtherCAT - 支持以下协议,周期时间低至 10 kHz (100µs):
CANopen over EtherCAT (CoE)
File over EtherCAT (FoE) 可传输设置数据和固件更新。
EtherCAT 以太网 (EoE)、EasyMotion Studio 可通过 Technosoft 自己的协议与 iPOS 控制器进行通信。
数字和模拟输入/输出:
6 个数字输入:12-36 V,PNP/NPN 可编程
6 个数字输出:5-36 V,0.5 A,PNP/NPN 可编程
2 个模拟输入:+/-10V 参考,0-5V 反馈或通用
可以使用数字输出来控制外部电机/抱闸
集成制动斩波器功能,用于控制外部制动电阻
安全:
防止过流、过热、欠压和过压、I2t 及以下错误。
STO - Safe Torque Off,安全完整性等级 SIL 3,
控制功能:
通过编码器、霍尔传感器或无传感器进行磁场定向控制 (FOC) 的正弦换向。
快速准确的控制回路结构,具有可定制的采样率和高达 100KHz 的 PWM 频率
通过灵活、同时使用 10 个 BiQuad 滤波器实现出色的共振和振动抑制。
用于动态调整 PID 控制器参数以实现最佳定位性能的增益调度。
双回路,同时评估两个不同的反馈传感器,以补偿齿轮间隙和机械弹性。
当编码器可用时,具有正弦换向和磁场定向控制 (FOC) 的闭环。
开环,每整步最多 512 微步,当编码器在负载上可用时,失步检测和自动位置 补偿。
操作模式:
位置、速度和扭矩控制
带梯形和正弦斜坡的路径生成器
Profile Position Mode、Velocity Mode、Homing Mode
带线性 (PT) 和三次样条 (PVT) 的插值位置
循环同步位置 (CSP)、速度 (CSV)、扭矩 (CST)
电子齿轮 (EGEAR) 和凸轮 (ECAM)
通过位置、速度、扭矩或电压进行运动轮廓
模拟外部参考、脉冲和方向
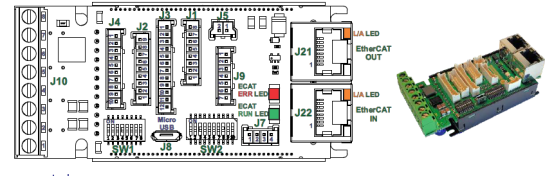
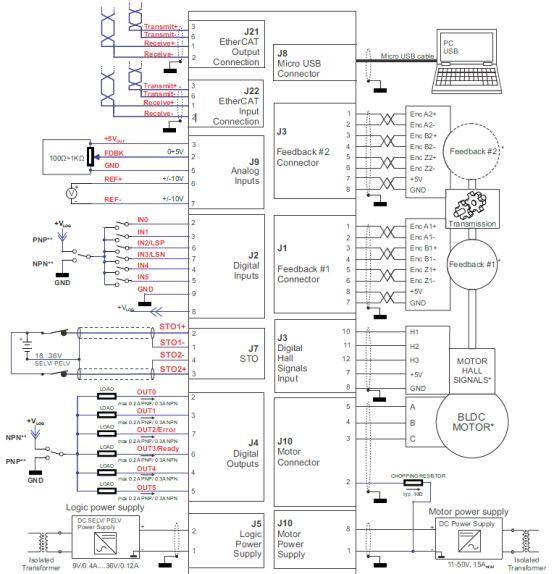
驱动器接口定义
技术指标
型号:Ipos481
定位 | 指标 |
功能 | 用于多种电机的通用型驱动卡 |
控制电机通道数 | 1 |
传感器通道数 | 1 |
供电电压 | 12V,24V,36V,48V |
输出电流—标称 | 10A RMS |
连续/峰值电流 | 14/40A |
控制电机类型 | 直流无刷,直流有刷,线性,步进,音圈 |
最大载波频率 | 50KHZ |
反馈形式 | Incremental,1Vpp Sin/Cos,SSI,BISS-C,EnDat 2.2,Digital Halls,Analog Halls,Tacho,Sensorless,Panasonic,TAMAGAWA,Nikon,Sanyo Denki |
通信接口 | RS-232,USB,EtherCAT |
数字输入 | 6 |
数字输出 | 6 |
模拟输出 | 2 |
外形尺寸 | 93 x 43.8 x 32mm |